Penjana Vakum Gripper Lembut Dua Jari Pneumatik Kolaboratif untuk Automasi Robot



Penjana Vakum Gripper Lembut Dua Jari Pneumatik Kolaboratif untuk Automasi Robot
Kategori Utama
Lengan robot perindustrian / Lengan robot kolaboratif / Penggenggam elektrik / Penggerak pintar / Penyelesaian automasi
Permohonan

Penggenggam robot siri SCIC Z-EFG bersaiz kecil dengan sistem servo terbina dalam, yang membolehkan kawalan kelajuan, kedudukan dan daya pengapit yang tepat dicapai. Sistem cengkaman canggih SCIC untuk penyelesaian automasi akan membolehkan anda membuka kemungkinan baharu untuk mengautomasikan tugas yang anda tidak pernah sangka mungkin.
Ciri
·Lejang besar
· Daya pengapit boleh laras dan lejang boleh laras
· Jangka hayat yang panjang: berpuluh-puluh juta kitaran, mengatasi kuku udara
·Pengawal terbina dalam: saiz kecil, integrasi mudah
·Kawalan bas EIA485, I/O
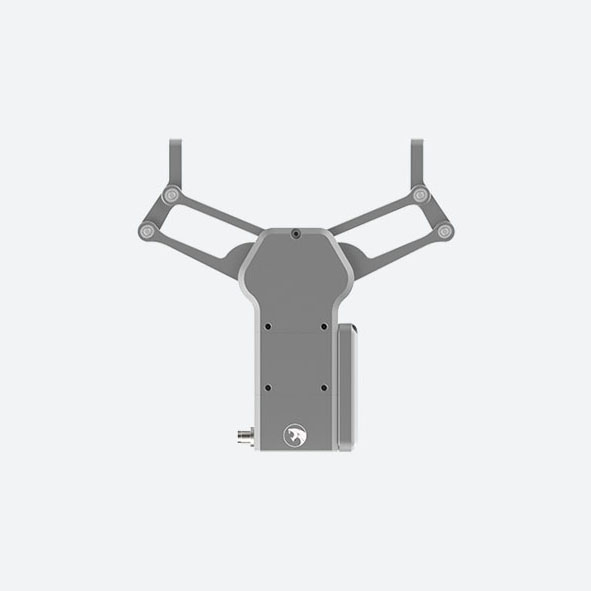
Daya Pengapit: 40-130N, Bentuk-Y bagi Gripper Elektrik dengan lejang 120mm
Lejang Panjang
Jumlah lejang: 120mm
Mod Kawalan
485 Modbus, EIA485, Kawalan Bas
Daya Pengapit
Daya Pengapit 40-130N Boleh Laras
Pengawal Di Dalam
Menukar kawasan kecil, mudah diintegrasikan
Kawalan Ketepatan
Kebolehulangan: ±0.02mm
Pengapit Lembut
Ia boleh mengapit objek yang rapuh dan boleh berubah bentuk

● Menggalakkan revolusi dalam penggantian pencengkam pneumatik dengan pencengkam elektrik, pencengkam elektrik pertama dengan sistem servo bersepadu di China.
● Pengganti sempurna untuk pemampat udara + penapis + injap solenoid + injap pendikit + pemegang pneumatik
● Hayat perkhidmatan berbilang kitaran, selaras dengan silinder tradisional Jepun



Parameter Spesifikasi
| Model No. Z-EFG-130 | Parameter |
| Jumlah strok | 120mm |
| Daya cengkaman | 40-130N |
| Kebolehulangan | ±0.02mm |
| Berat cengkaman yang disyorkan | Maks. 1kg |
| Penularan mod | Nat skru + penghubung |
| Pengisian semula gris pada komponen yang bergerak | Setiap enam bulan atau 1 juta pergerakan/masa |
| Masa gerakan strok sehala | 0.9s |
| Julat suhu operasi | 5-55℃ |
| Julat kelembapan operasi | RH35-80(Tiada fros) |
| Mod pergerakan | Hubungan |
| Kawalan strok | Boleh laras |
| Pelarasan daya pengapit | Boleh laras |
| Berat | 0.8kg |
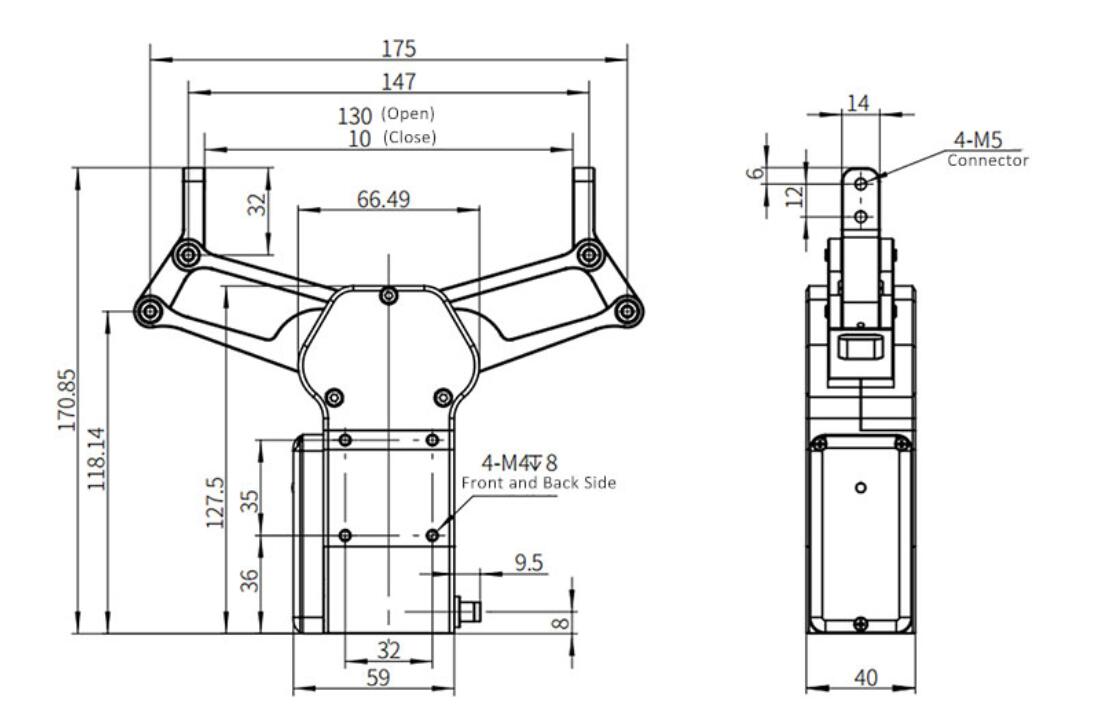
| Dimensi(L*W*T) | 171*187*40mm (buka) 218*66.5*40m (tutup) |
| Penempatan pengawal | Terbina dalam |
| Kuasa | 10W |
| Jenis motor | DC tanpa berus |
| Arus Puncak | 2A |
| Voltan yang dinilai | 24V |
| Arus siap sedia | 0.4A |
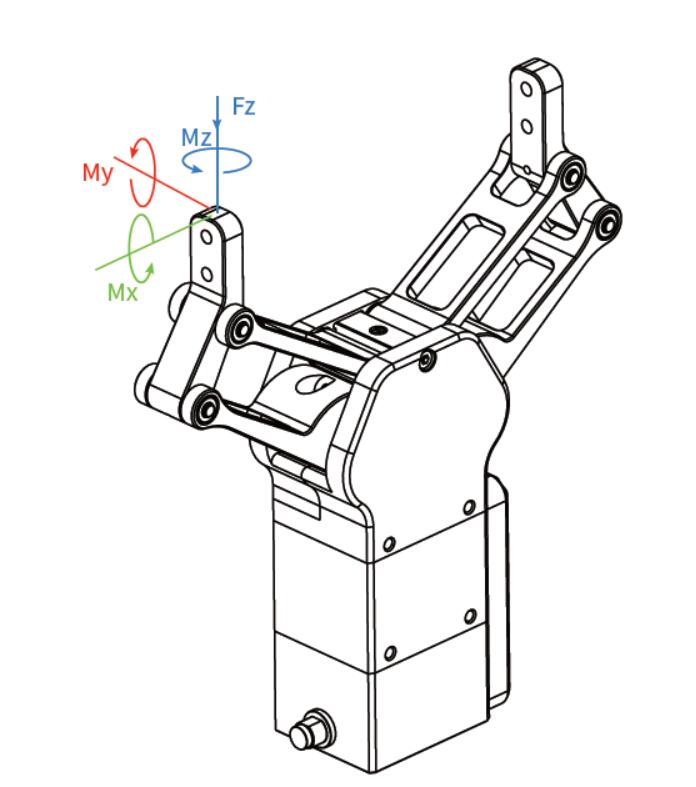
| Beban statik yang dibenarkan dalam arah menegak | |
| Fz: | 200N |
| Tork yang dibenarkan | |
| Mx: | 2 Nm |
| Saya: | 2 Nm |
| Mz: | 2 Nm |
Pasang dan Main, Mudah untuk Diintegrasikan
Penggenggam elektrik Z-EFG-130 boleh serasi dengan lengan robot kolaboratif, dan ia mempunyai sistem servo bersepadu di dalamnya, hanya satu penggenggam yang boleh sama dengan pemampat + penapis + injap solenoid + injap pendikit + penggenggam udara.


Strok Panjang, Keserasian Hebat
Strok cekap bagi gripper elektrik boleh sehingga 120mm, saiz penutupnya ialah 10mm, gripper elektrik boleh digunakan untuk cip semikonduktor, elektronik 3C dan industri ketepatan lain, dan sebagainya.
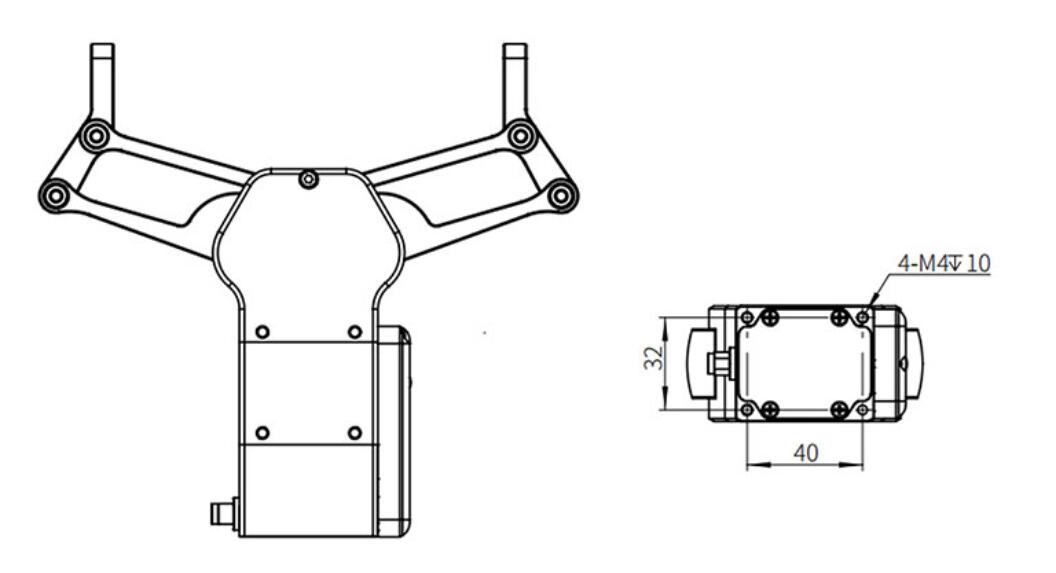
Saiz Kecil, Mudah untuk Diintegrasikan

Saiz bukaan Z-EFG-130 ialah 171*187*40mm, saiz penutupan ialah 218*66.5*40mm, ia adalah struktur yang padat, menyokong pelbagai jenis pemasangan, ia adalah pengawal di dalam, kawasan kecil yang dilindungi.

Kawalan Daya Ketepatan
Penggenggam elektrik menggunakan reka bentuk transmisi khas dan pampasan algoritma pemacu, daya pengapit boleh laras 40-130N, berat pengapit cadangan ≤1kg, dan ia boleh mencapai kebolehulangan ±0.02mm.
Cengkaman Adaptif, Ekor Boleh Ditukar

Penggenggam elektrik Z-EFG-130 menyokong pengapit adaptif, ia lebih sesuai untuk objek bulat, sfera atau berbentuk khas, bahagian ekornya boleh diubah suai dengan mudah, pelanggan boleh mengapit objek mengikut keperluan mereka.


Mod Kawalan Berganda, Mudah Dikendalikan

Penggenggam elektrik boleh dikawal ketepatannya oleh Modbus, konfigurasinya mudah, untuk menggunakan protokol komunikasi Digital I/O, hanya memerlukan satu kabel untuk disambungkan dengan ON/OFF, ia serasi dengan sistem kawalan utama PLC.
Pusat Beban Ofset Graviti
Perniagaan Kami


Kategori produk
-

Robot Perindustrian Harga Kompetitif 6 Paksi Manip...
-

Petik dan Letakkan Buah Telur Berkelajuan Tinggi Industri 4...
-

Artikulasi Lengan Robot Kolaboratif Enam Paksi Dobot...
-

Manipulator Teleskopik Tentera Lengan Robot Panjang 20...
-
Jualan Panas Lengan Robot Logam 6-Paksi Robot Mekanikal...
-

Manipulator 4 Paksi Lengan Robot Mesin Perindustrian...