SIRI PEMEGANG ELEKTRIK HITBOT – Pemegang Elektrik Kolaboratif Z-EFG-R



Kategori Utama
Lengan robot perindustrian / Lengan robot kolaboratif / Penggenggam elektrik / Penggerak pintar / Penyelesaian automasi
Permohonan
Penggenggam robot siri SCIC Z-EFG bersaiz kecil dengan sistem servo terbina dalam, yang membolehkan kawalan kelajuan, kedudukan dan daya pengapit yang tepat dicapai. Sistem cengkaman canggih SCIC untuk penyelesaian automasi akan membolehkan anda membuka kemungkinan baharu untuk mengautomasikan tugas yang anda tidak pernah sangka mungkin.

Ciri

·Penggenggam elektrik motor servo yang kecil tetapi berkuasa.
·Terminal boleh digantikan untuk memenuhi keperluan projek yang berbeza.
·Boleh mengutip objek yang rapuh dan boleh berubah bentuk, seperti telur, tabung uji, cincin, dsb.
·Sesuai untuk pemandangan tanpa sumber udara (seperti makmal dan hospital).
Sistem Servo Bersepadu Digunakan untuk Pelbagai Permintaan
Daya Pengapit Besar
Daya pengapit: 80N,
lejang: 20mm
Kawalan Ketepatan
Kebolehulangan: ±0.02mm
Pasang dan Main
Direka khas untukpencengkam elektrik enam paksi
Pengawal Terbina Dalam
Kawasan kecil yang meliputi, mudah untuk diintegrasikan.
Ekor Boleh Diubah
Ekornya boleh diubah untuk digunakan bagi pelbagai permintaan.
Pengapit Lembut
Ia boleh mengapit objek rapuh

● Menggalakkan revolusi dalam penggantian pencengkam pneumatik dengan pencengkam elektrik, pencengkam elektrik pertama dengan sistem servo bersepadu di China.
● Pengganti sempurna untuk pemampat udara + penapis + injap solenoid + injap pendikit + pemegang pneumatik
● Hayat perkhidmatan berbilang kitaran, selaras dengan silinder tradisional Jepun




Parameter Spesifikasi
Z-EFG-R ialah pencengkam elektrik robotik dengan pengawal terbina dalam dan pelbagai fungsi dalam satu. Bersaiz kecil, tetapi berfungsi dengan berkuasa.
● Cengkaman elektrik motor servo yang kecil tetapi berkuasa.
●Terminal boleh digantikan untuk memenuhi keperluan projek yang berbeza.
● Boleh mengutip objek yang rapuh dan boleh berubah bentuk, seperti telur, tabung uji, cincin, dsb.
● Sesuai untuk pemandangan tanpa sumber udara (seperti makmal dan hospital).
Z-EFG-R ialah pencengkam elektrik kecil yang mempunyai sistem servo bersepadu, ia boleh menggantikan pam + penapis + nilai magnet elektron + injap pendikit + pencengkam udara.
| Model No. Z-EFG-R | Parameter |
| Strok keseluruhan | 20mm |
| Daya cengkaman | 80U |
| Kebolehulangan | ±0.02mm |
| Berat cengkaman yang disyorkan | 0.8kg |
| Mod penghantaran | Rak gear + Panduan penggelek silang |
| Pengisian semula gris pada komponen yang bergerak | Setiap enam bulan atau 1 juta pergerakan/masa |
| Masa gerakan strok sehala | 0.45s |
| Julat suhu operasi | 5-55℃ |
| Julat kelembapan operasi | RH35-80(Tiada fros) |
| Mod pergerakan | Dua jari bergerak secara mendatar |
| Kawalan strok | Boleh laras |
| Pelarasan daya pengapit | Boleh laras |
| Berat | 0.5kg |
| Dimensi(P*L*T) | 68*68*132.7mm |
| Penempatan pengawal | Terbina dalam |
| Kuasa | 5W |
| Jenis motor | DC tanpa berus |
| Voltan yang dinilai | 24V |
| Arus puncak | 1A |
| Lengan robot enam paksi yang boleh disesuaikan | UR, Aubo |
Pemanduan dan Pengawal Terbina Dalam
Z-EFG-R ialah pencengkam elektrik kecil yang mempunyai sistem servo bersepadu, ia boleh menggantikan pam udara + penapis + injap magnet elektron + injap pendikit + pencengkam udara.


Sesuai dengan Lengan Robot Enam Paksi
Gripper ini boleh serasi dengan lengan robot enam paksi arus perdana, untuk merealisasikan pasang dan main, ia mempunyai strok panjang 20mm, daya pengapit ialah 80N, strok dan daya pengapitnya boleh dilaraskan.
Rajah Kecil, Fleksibel untuk Dipasang
Saiz Z-EFG-R ialah L68*L68* T132.7mm, strukturnya padat, menyokong kaedah berbilang pemasangan, pengawal terbina dalam, ruang yang kecil, mudah digunakan untuk pelbagai permintaan tugas pengapit.

Cepat Bertindak Balas, Kawalan Ketepatan
Masa pergerakan terpendek bagi satu strok ialah 0.45s, kebolehulangannya ialah ±0.02mm, bahagian ekornya boleh ditukar dengan mudah, pelanggan boleh mengapit objek mengikut permintaan.
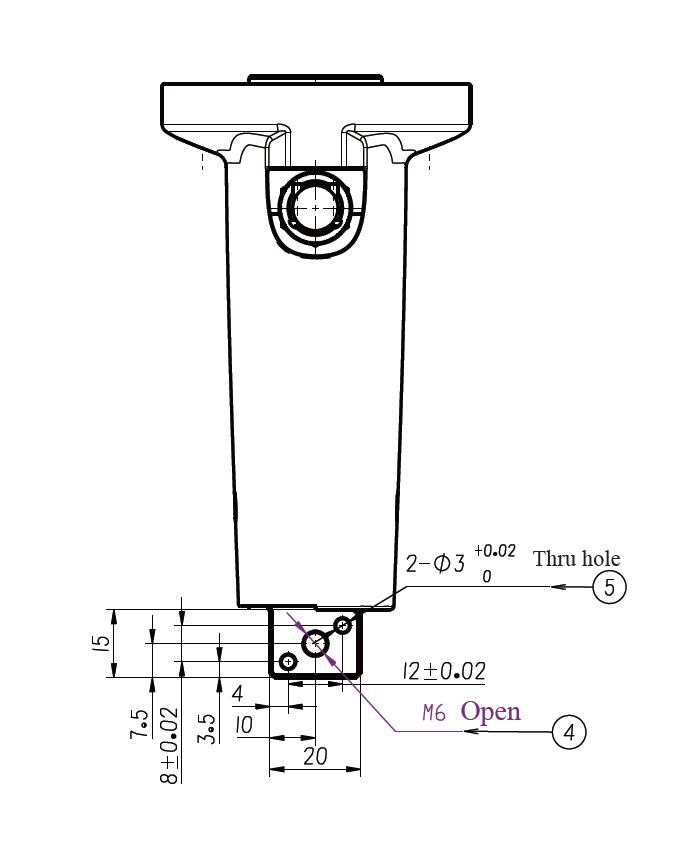
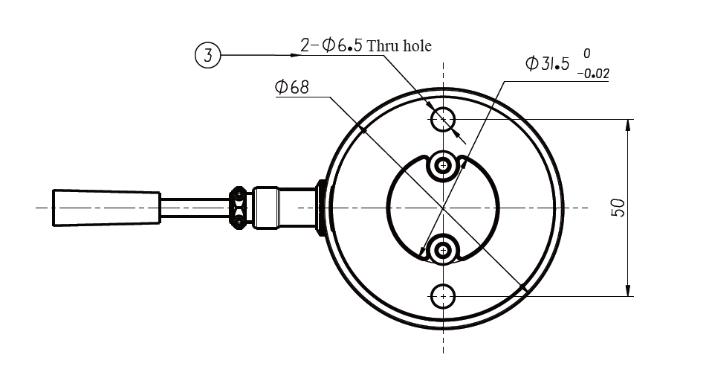
Gambarajah Pemasangan Dimensi
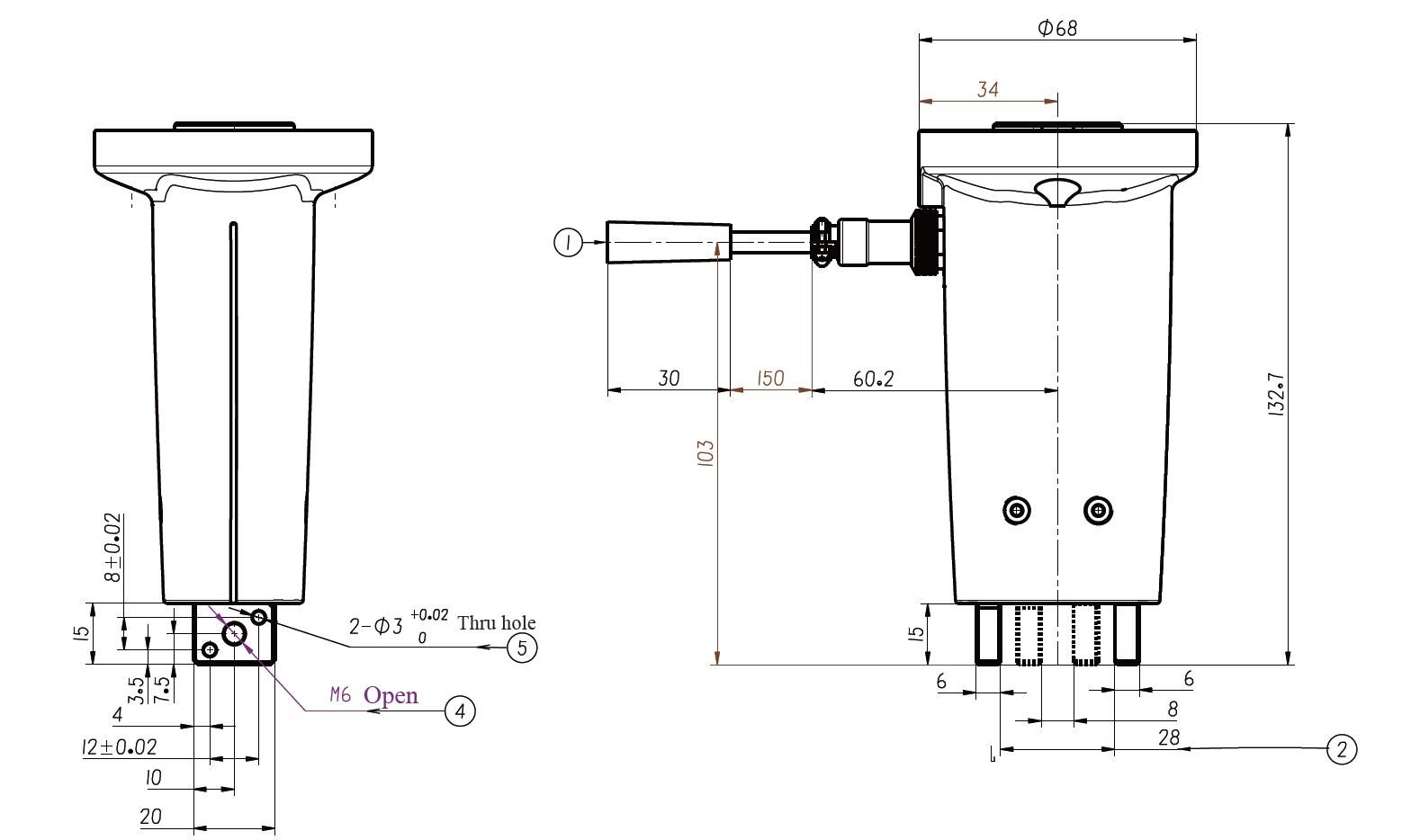
① RKMV8-354 Palam penerbangan lima teras ke RKMV8-354
② Lejang pencengkam elektrik ialah 20mm
③ Kedudukan pemasangan, gunakan dua skru M6 untuk menyambung dengan bebibir di hujung lengan robot UR
④ Kedudukan pemasangan, kedudukan pemasangan lekapan (skru M6)
⑤ Kedudukan pemasangan, kedudukan pemasangan lekapan (3 lubang pin silinder)
Parameter Elektrik
Voltan dinilai 24±2V
Arus 0.4A

Perniagaan Kami







