SIRI PEGANG ELEKTRIK HITBOT – Pegangan Elektrik Tiga Jari Z-ECG-10




Kategori Utama
Lengan robot perindustrian / Lengan robot kolaboratif / Penggenggam elektrik / Penggerak pintar / Penyelesaian automasi
Permohonan

Ciri

·Pengesanan penurunan pengapit, fungsi output kawasan
·Daya, kedudukan, kelajuan boleh dikawal, kawalan tepat melalui Modbus
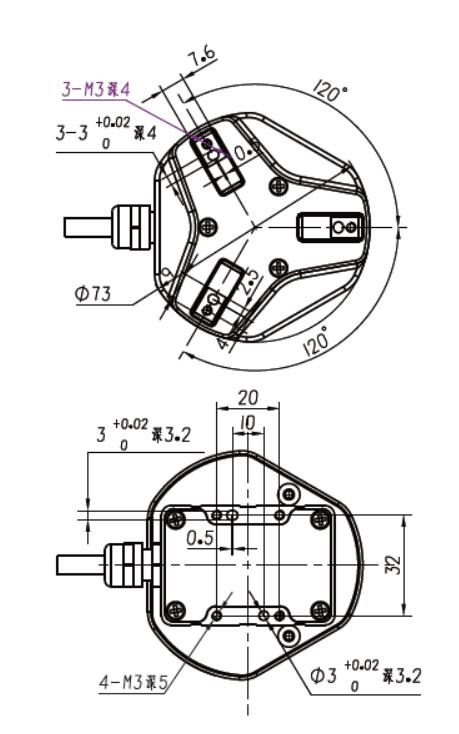
·Pemegang tengah tiga jari
·Pengawal terbina dalam: jejak kecil, integrasi mudah
·Mod kawalan: 485 (Modbus RTU), I/O
Cengkaman Elektrik Tiga Jari Mudah untuk Mengapit Objek Silinder
Prestasi Tinggi
Daya Pengapit: 3-10N,
Ketumpatan Tenaga Tinggi
Ketepatan untuk Kawalan
Ia boleh dikawal oleh Modbus
Bijak untuk Memberi Maklum Balas
Ia mempunyai fungsi pengesanan jatuh pengapit pf output serantau.
Pengawal Terbina Dalam
Penutup ruang kecil, mudah diintegrasikan.
Mod Berbilang Kawalan
Sokongan 485 (Modbus) I/O
Pegangan Tiga Jari
Pengapit tiga jari, sesuai untuk pelbagai majlis




Parameter Spesifikasi
| Model No. Z-ECG-10 | Parameter |
| Jumlah strok | 10mm |
| Daya cengkaman | 3-10N |
| Kebolehulangan | ±0.03mm |
| Berat cengkaman yang disyorkan | Maks. 0.2kg |
| Penularan mod | Rak dan Pinion + Rel Panduan Bola |
| Pengisian semula gris pada komponen yang bergerak | Setiap enam bulan atau 1 juta pergerakan/masa |
| Masa gerakan strok sehala | 0.3s |
| Julat suhu operasi | 5-55℃ |
| Julat kelembapan operasi | RH35-80(Tiada fros) |
| Blacklash | Sisi tunggal: 0.2mm |
| Kawalan strok | Boleh laras |
| Pelarasan daya pengapit | Boleh laras |
| Berat | 0.5kg |
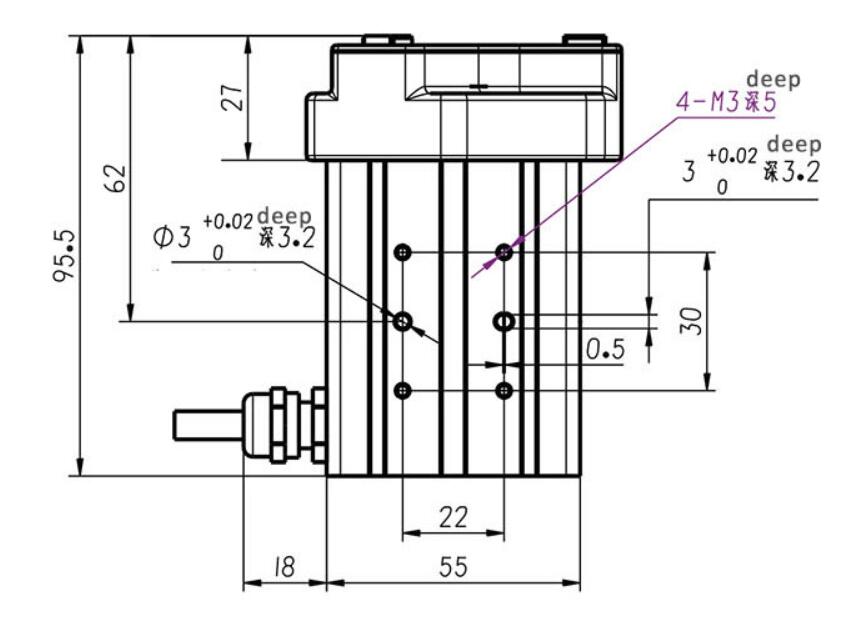
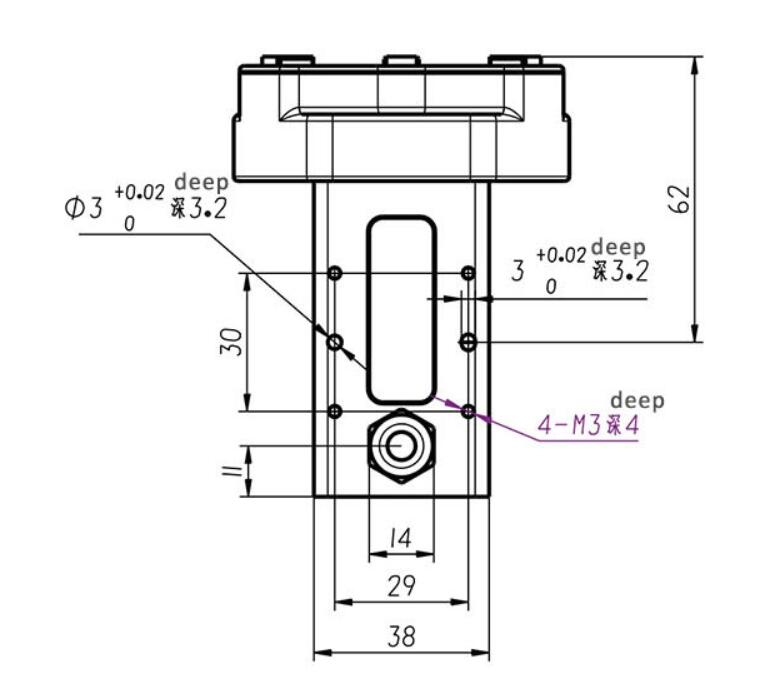
| Dimensi(L*W*T) | 73*73*95.5mm |
| Gred Perlindungan | IP20 |
| Jenis motor | Motor Elektrik Servo |
| Arus Puncak | 0.6A |
| Voltan yang dinilai | 24V ±10% |
| Arus siap sedia | 0.3A |
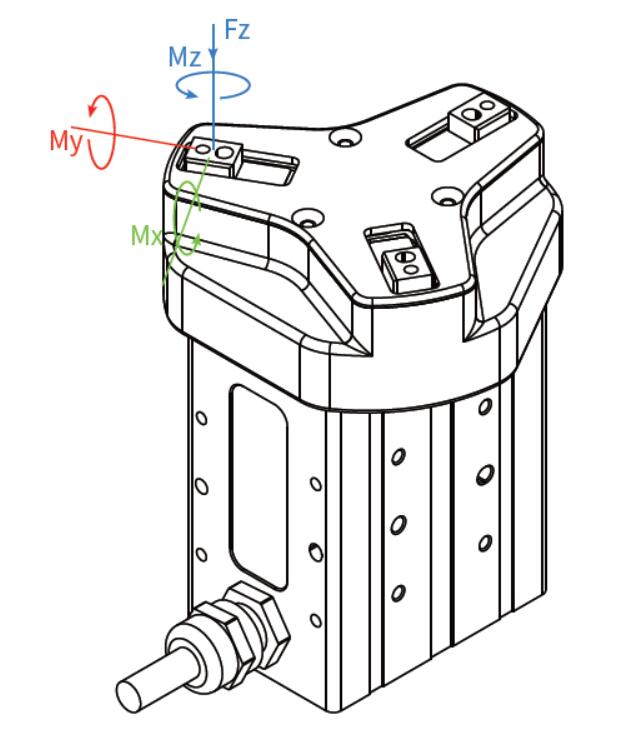
| Beban statik yang dibenarkan dalam arah menegak | |
| Fz: | 70N |
| Tork yang dibenarkan | |
| Mx: | 0.64 Nm |
| Saya: | 0.4 Nm |
| Mz: | 0.48 Nm |
Ketepatan Penentuan Posisi, Pegangan Tiga Jari
Penggenggam elektrik tiga jari Z-ECG-10, kebolehulangannya ialah ±0.03mm, ia adalah tiga jari untuk diapit, dan ia mempunyai fungsi pengesanan penurunan pengapit, output serantau, yang boleh menjadi lebih baik untuk mengapit objek silinder.


Pengawal Terbina Dalam, Integrasi Tinggi
Perlindungan hebat untuk beban berlebihan serta-merta, bagi memastikan cengkaman elektrik tidak mengalami gangguan sistem atau situasi luar biasa yang lain. Ia mempunyai pengawal terbina dalam, daya, mata dan kelajuan boleh dikawal, ia meliputi ruang kerja yang kecil, mudah diintegrasikan.
Rajah Kecil, Fleksibel untuk Dipasang

Z-ECG-10 menggunakan jenis transmisi rak dan pinion + panduan linear, saiznya ialah L73*W73*H109, beratnya hanya 0.65kg, strukturnya padat, menyokong pelbagai jenis pemasangan, mudah untuk menyelesaikan banyak tugas pengapit.


Cepat Bertindak Balas, Kawalan Daya Ketepatan
Pukulan terpendek tunggal ialah 0.3s, daya pengapit ialah 3-10N, strok pengapit ialah 10mm, berat kira-kira 0.2kg, yang boleh mencapai ketepatan yang tinggi untuk diapit.
Mod Kawalan Berganda, Mudah Dikendalikan

Z-ECG-10 boleh dikawal ketepatannya oleh Modbus, ia mudah diperuntukkan, untuk menggunakan komunikasi I/O Digital, hanya memerlukan satu kabel untuk menyambung ON/OFF, ia juga serasi dengan sistem kawalan utama PLC.

Pusat Beban Ofset Graviti
Perniagaan Kami







