SIRI PEGANG ELEKTRIK HITBOT – Pegangan Elektrik Berputar Z-ERG-20-100S



Kategori Utama
Lengan robot perindustrian / Lengan robot kolaboratif / Penggenggam elektrik / Penggerak pintar / Penyelesaian automasi
Permohonan
Penggenggam robot siri SCIC Z-EFG bersaiz kecil dengan sistem servo terbina dalam, yang membolehkan kawalan kelajuan, kedudukan dan daya pengapit yang tepat dicapai. Sistem cengkaman canggih SCIC untuk penyelesaian automasi akan membolehkan anda membuka kemungkinan baharu untuk mengautomasikan tugas yang anda tidak pernah sangka mungkin.

Ciri
·Ia menyokong putaran tak terhingga dan putaran relatif, tiada cincin gelincir, dan kos penyelenggaraannya rendah.
·Kelajuan putaran dan daya pengapitnya boleh dikawal dengan tepat.
·Ia mempunyai puluhan juta kitaran, yang merupakan jangka hayat yang panjang, melebihi cengkaman udara.
·Pengawalnya terbina dalam, yang akan menempati ruang kerja kecil, mudah untuk diintegrasikan.
·Mod Kawalan: Ia menyokong talian utama Modbus dan I/O untuk mengawal.
·Daya pengapitnya boleh sehingga 100N, tork putaran boleh sehingga 1.5Nm
Daya Pengapit 100N, Untuk Menyokong Putaran Tak Terhingga, Tiada Cincin Gelincir, Kos Penyelenggaraan Rendah.
Pegangan Putar
Menyokong putaran tak terhingga dan putaran relatif
Ketepatan untuk Kawalan
Daya putaran dan pengapit, bit dan kelajuan boleh dikawal dengan tepat
Jangka hayat yang panjang
Sepuluh juta kitaran, mengatasi pencengkam udara.
Pengawal terbina dalam
Menduduki bilik kecil, mudah untuk diintegrasikan.
Mod Kawalan
Untuk menyokong kawalan Modbus dan kawalan I/O
Pengapit Lembut
Daya pengapit maksimum ialah 100N, tork putaran maksimum ialah 1.65Nm.
● Menggalakkan revolusi dalam penggantian pencengkam pneumatik dengan pencengkam elektrik, pencengkam elektrik pertama dengan sistem servo bersepadu di China.
● Pengganti sempurna untuk pemampat udara + penapis + injap solenoid + injap pendikit + pemegang pneumatik
● Hayat perkhidmatan berbilang kitaran, selaras dengan silinder tradisional Jepun



Parameter Spesifikasi
| Model No. Z-ERG-20-100S | Parameter |
| Strok keseluruhan | Boleh laras 20mm |
| Daya cengkaman | Boleh laras 30-100N |
| Kebolehulangan | ±0.2mm |
| Berat cengkaman yang disyorkan | ≤1kg |
| Mod penghantaran | Rak dan pinion + Trek penggelek silang |
| Pengisian semula gris pada komponen yang bergerak | Setiap enam bulan atau 1 juta pergerakan/masa |
| Masa gerakan strok sehala | 0.3s |
| Tork maksimum berputar | 1.5 Nm |
| Kelajuan maksimum berputar | 180 RPM |
| Julat putaran | Putaran tak terhingga |
| Tindak balas berputar | ±1° |
| Berat | 1.2kg |
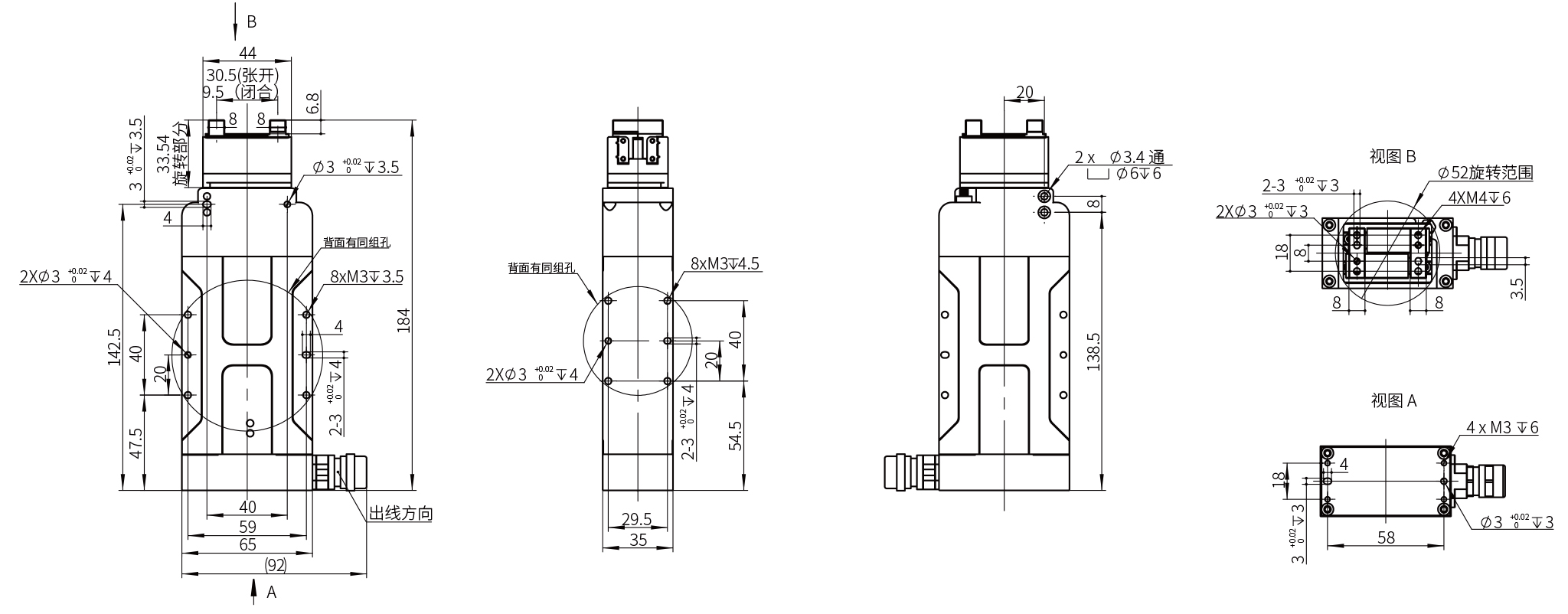
| Dimensi | 65*35*184mm |
| Voltan operasi | 24V±10% |
| Arus yang dinilai | 2A |
| Arus maksimum | 4A |
| Kuasa | 50W |
| Kelas perlindungan | IP20 |
| Jenis motor | Motor servo |
| Julat suhu operasi | 5-55℃ |
| Julat kelembapan operasi | RH35-80 (Tiada fros) |
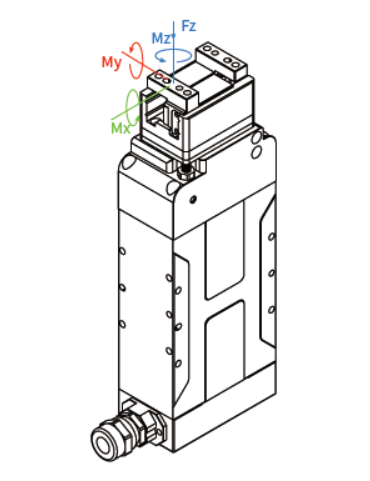
| Beban statik yang dibenarkan dalam arah menegak | |
| Fz: | 150N |
| Tork yang dibenarkan | |
| Mx: | 1.6 Nm |
| Saya: | 1.8 Nm |
| Mz: | 1.6 Nm |
Tiada Cincin Gelincir, Kos Penyelenggaraan Rendah

Z-ERG-20-100s menyokong putaran dan putaran relatif tanpa had, tiada gelang gelincir, kos penyelenggaraan yang rendah, jumlah stok ialah 20mm, ia menggunakan reka bentuk penghantaran khas dan pampasan algoritma pemacu, daya pengapit boleh laras 30-100N.

Reaksi Pantas, Lebih Stabil

Masa terpendek bagi lejang tunggal hanya 0.3s untuk pencengkam putar elektrik, tork maksimumnya hanya 1.5Nm, kebolehulangan ialah ±0.2mm.
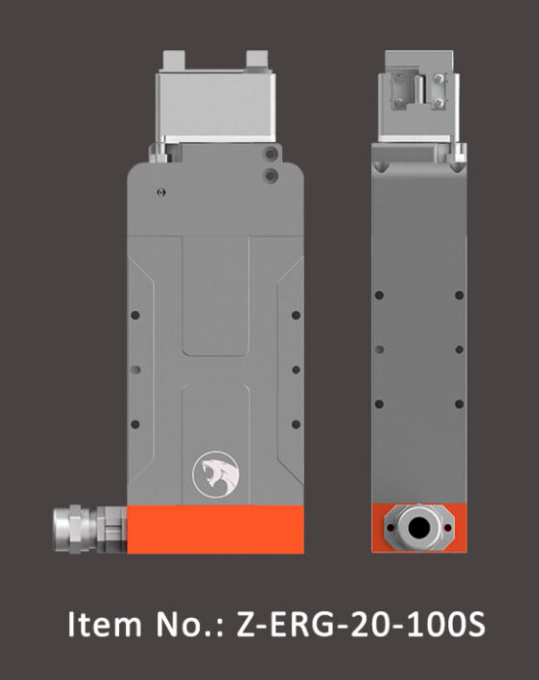
Gambar Kecil, Mudah untuk Berintergate

Saiz Z-ERG-20-100S ialah L65*L34*T184mm, beratnya 1.2kg, gred IP ialah IP20, strukturnya padat, menempati ruang kecil, mudah untuk mengendalikan pelbagai tugas berputar.


Pemanduan dan Kawalan Bersepadu, Pengapit Lembut

Bahagian ekor pencengkam putar boleh ditukar dengan mudah, pelanggan boleh mereka bentuk bahagian ekor secara khas mengikut objek pengapit, untuk menjamin pencengkam dapat menyelesaikan tindakan putar dan pengapit pada tahap maksimum.
Mod Kawalan Berganda, Mudah Dikendalikan

Konfigurasi gripper Z-ERG-20-100S adalah mudah, pengawal terbina dalam, menempati ruang kecil, mudah untuk disepadukan, ia menyokong kawalan Modbus dan kawalan I/O.

Pusat Beban Ofset Graviti
Perniagaan Kami







